
Summary
The U.S. military’s investments in unmanned aircraft systems (UAS) have proven invaluable for missions ranging from intelligence, surveillance and reconnaissance (ISR) to tactical strike, but most current systems demand continuous control by a dedicated pilot and sensor operator supported by numerous telemetry-linked analysts.
This requirement severely limits the scalability and cost-effectiveness of UAS operations and compounds the operational challenges posed by dynamic, remote engagements against highly mobile targets in contested electromagnetic environments.
DARPA’s Collaborative Operations in Denied Environment (CODE) program aims to overcome these limitations with new algorithms and software for existing unmanned aircraft that would extend mission capabilities and improve U.S. forces’ ability to conduct operations in denied or contested airspace. CODE researchers seek to create a modular software architecture beyond the current state of the art that is resilient to bandwidth limitations and communications disruptions yet compatible with existing standards and amenable to affordable retrofit into existing platforms.
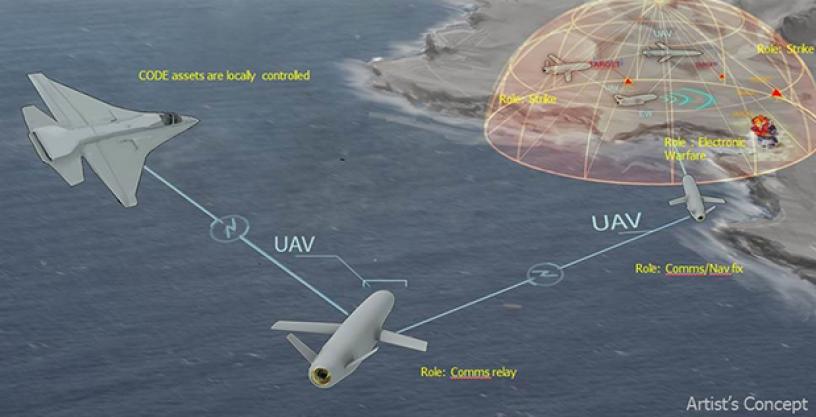
CODE intends to focus in particular on developing and demonstrating improvements in collaborative autonomy—the capability of groups of UAS to work together under a single person’s supervisory control. The unmanned vehicles would continuously evaluate their own states and environments and present recommendations for coordinated UAS actions to a mission supervisor, who would approve or disapprove such team actions and direct any mission changes. Using collaborative autonomy, CODE-enabled unmanned aircraft would find targets and engage them as appropriate under established rules of engagement, leverage nearby CODE-equipped systems with minimal supervision, and adapt to dynamic situations such as attrition of friendly forces or the emergence of unanticipated threats.
CODE’s envisioned improvements to collaborative autonomy would help transform UAS operations from requiring multiple operators for each UAS to having one mission commander simultaneously directing all of the unmanned vehicles required for the mission. Commanders could mix and match different systems with specific capabilities to suit individual missions instead of depending on a single UAS with integrated capabilities, the loss of which would be potentially catastrophic. This flexibility could significantly increase the mission- and cost-effectiveness of legacy assets, reduce development times and costs for future systems, and enable new deployment concepts.
The program plans to develop the operational concepts for CODE-enabled strike missions and validate their effectiveness through detailed modeling and simulation. It also intends to develop the most promising capabilities and demonstrate them in flight using multiple surrogate UAS equipped with mesh network radios and a variety of payloads, augmented by a number of virtual UAS.
Office
Tactical Technology OfficeThis program is now complete
This content is available for reference purposes. This page is no longer maintained.
