
SHRIMP program seeks to advance the state-of-the art in micro-to-milli robotics platforms and underlying technology
July 17, 2018
Imagine a natural disaster scenario, such as an earthquake, that inflicts widespread damage to buildings and structures, critical utilities and infrastructure, and threatens human safety. Having the ability to navigate the rubble and enter highly unstable areas could prove invaluable to saving lives or detecting additional hazards among the wreckage. Partnering rescue personnel with robots to evaluate high-risk scenarios and environments can help increase the likelihood of successful search and recovery efforts, or other critical tasks while minimizing the threat to human teams.
“Whether in a natural disaster scenario, a search and rescue mission, a hazardous environment, or other critical relief situation, robots have the potential to provide much needed aide and support,” said Dr. Ronald Polcawich, a DARPA program manager in the Microsystems Technology Office (MTO). “However, there are a number of environments that are inaccessible for larger robotic platforms. Smaller robotics systems could provide significant aide, but shrinking down these platforms requires significant advancement of the underlying technology.”
Technological advances in microelectromechanical systems (MEMS), additive manufacturing, piezoelectric actuators, and low-power sensors have allowed researchers to expand into the realm of micro-to-milli robotics. However, due to the technical obstacles experienced as the technology shrinks, these platforms lack the power, navigation, and control to accomplish complex tasks proficiently.
To help overcome the challenges of creating extremely SWaP-constrained microrobotics, DARPA is launching a new program called SHort-Range Independent Microrobotic Platforms (SHRIMP). The goal of SHRIMP is to develop and demonstrate multi-functional micro-to-milli robotic platforms for use in natural and critical disaster scenarios. To achieve this mission, SHRIMP will explore fundamental research in actuator materials and mechanisms as well as power storage components, both of which are necessary to create the strength, dexterity, and independence of functional microrobotics platforms.
Actuator technologies greatly affect a robotic platform’s mobility, load-bearing capacity, and dexterity, among other capabilities. Under the SHRIMP program, researchers will work to push beyond the current state-of-the-art and develop actuator materials and mechanisms that prioritize force generation, efficiency, strength-to-weight ratio, and maximum work density.
“The strength-to-weight ratio of an actuator influences both the load-bearing capability and endurance of a micro-robotic platform, while the maximum work density characterizes the capability of an actuator mechanism to perform high intensity tasks or operate over a desired duration,” said Polcawich. “Making significant advances to actuator mechanisms and materials will greatly impact our ability to develop micro-to-milli robotic platforms capable of performing complex tasks in the field.”
In addition to advancing the state-of-the-art for actuator technology, SHRIMP seeks to develop highly efficient power storage devices and power conversion circuitry. Most micro-robotics platforms rely on tethers for power, processing, or control, and are significantly constrained by energy-inefficient actuation technology as well as limited-energy storage devices. As SHRIMP aims to create complex micro-to-milli robots that operate independently, creating compact power sources and converters that can support high-voltage actuation mechanisms and significantly reduce battery drain becomes critical. As such, SHRIMP will explore fundamental research into power converters that can operate at frequencies of tens of Hz with exceptional efficiency as well as high energy density and high specific energy battery technologies.
“Micro-to-mm sized platforms provide a unique opportunity to push the development of highly efficient, versatile microelectronics,” said Polcawich. “While the goal of SHRIMP is develop small-scale, independent robotics platforms, we anticipate that discoveries made through our actuator and power storage research could prove beneficial to a number of fields currently constrained by these technical challenges–from prosthetics to optical steering.”
While advancing actuator and power supply technology will help to significantly advance the field, they are only part of the challenge when it comes to developing micro-to-milli robotics. “Engineering for extreme SWaP minimization is a diverse task that must take these areas into account but also the mechanical, electrical, and thermal considerations required for designing a highly-functional microsystem,” said Polcawich.
Researchers will be further challenged to bring the fundamental research efforts together with engineering problem solving to develop and demonstrate multi-functional micro-to-milli scale robotics platforms that deliver untethered mobility, maneuverability, and dexterity. The SHRIMP platforms will be evaluated using many of the same principles employed in the National Institute of Standards and Technology (NIST) Robotics Test Facility, which has been adapted for micro-to-milli robotic platforms. To determine potential field utility, each participating team will compete in an Olympic-style evaluation to test the platform’s mobility, maneuverability across flat and inclined surfaces, load-bearing capability, speed, and other capabilities.
For a full program description, please visit the Broad Agency Announcement published here on FedBizOpps: https://www.fbo.gov/index?s=opportunity&mode=form&id=b5c7d8976edbed5793af8d3a43dd97f7&tab=core&_cview=1
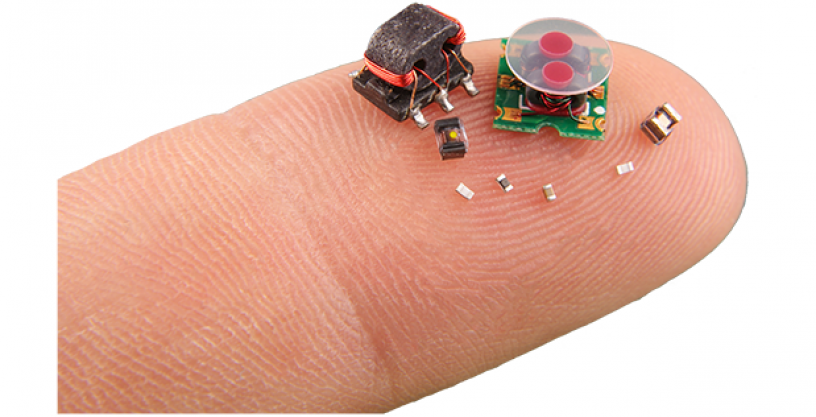
Image Caption:The SHRIMP program seeks to advance the development of multi-functional mm-to-cm scale robotics platforms. Critical to this effort will be foundational research in micro-actuator materials and energy efficient power systems for extremely SWaP-constrained microrobotics systems. Such advances could be enabling for applications that include search and rescue, disaster relief, hazardous environment inspection, in-flight control of aerodynamic platforms, steerable optics, and prosthetics.
# # #
Media with inquiries should contact DARPA Public Affairs at outreach@darpa.mil
Associated images posted on www.darpa.mil and video posted at www.youtube.com/darpatv may be reused according to the terms of the DARPA User Agreement, available here: http://go.usa.gov/cuTXR.
Tweet @darpa