The Atlas disaster-response robot made its public debut on July 11, 2013.
In its original form, the 6’2”, 330-lb. humanoid robot — developed for DARPA by Boston Dynamics of Waltham, Mass. — was capable of a range of natural movements. A tether connected the robot to both an off-board power supply and computer through which a human operator issued commands.
Atlas was created for use in the DARPA Robotics Challenge (DRC), a prize competition intended to speed the development of advanced robotic hardware, software, sensors and control interfaces so that robots might assist humans in responding to future natural and man-made disasters.
Seven of the Atlas robot platforms were presented to qualifying teams from an early, simulation-based round of the DRC that focused on software development. At the time of its debut, ATLAS was one of the most advanced humanoid robots ever built, but it was essentially a physical shell for the software brains and nerves that the teams developed.
The teams used their Atlas robots to compete in the live DRC Trials in December 2013, where they attempted to guide the robots through a series of physical tasks representative of what might be encountered in disaster zones.
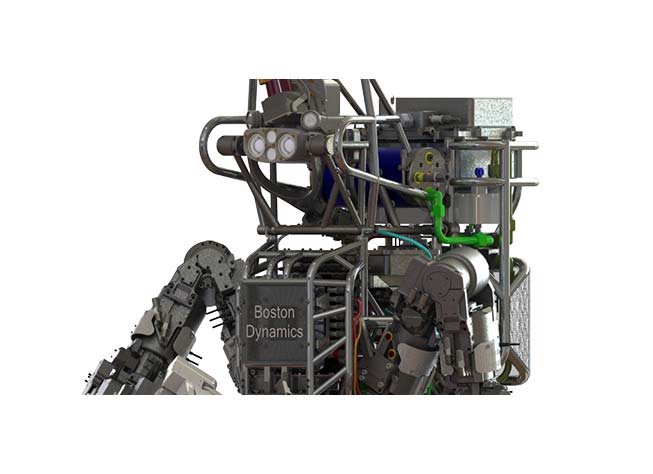
In preparation for the June 2015 DRC Finals, to be held in Pomona, Calif., DARPA called on Boston Dynamics to improve Atlas’ power efficiency, switch to on-board power and wireless communication, strengthen its limbs and improve its durability, and update its appearance. These tasks were completed in mid-2015.